Imagine a human-like robot in your daily life. It interacts with your children and pets, serves you at the supermarket, and even, if necessary, extracts your tooth or performs a more complex operation. It is now possible, as scientists have finally found the answer on how to give robots human-like tactile senses. While they cannot feel as we do, robots are now able to detect their environment almost as well as a human.
Osaka Prefecture University (OPU) is already well known as the birthplace for robots that are the most human-like in appearance, Erica and Ibuki. Another research group led by Prof. Kuniharu Takei has accepted a challenge that is probably even more ambitious: to make electronic skin that senses in the same way as a human’s.
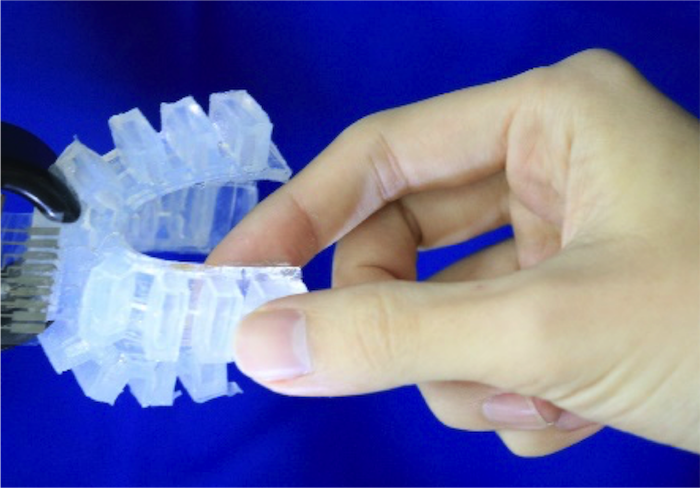
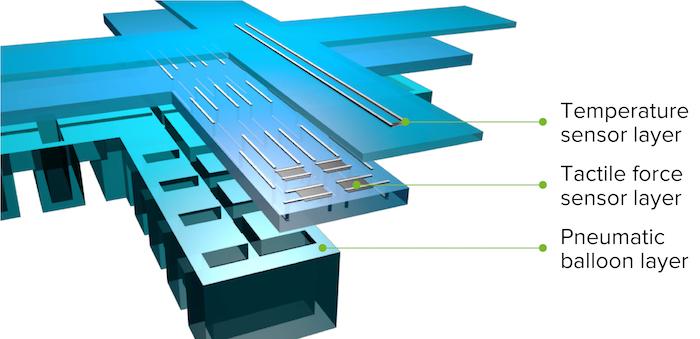
Without any thought, we can gently stroke a puppy or firmly shake someone’s hand, but today’s robots are unable to distinguish these types of touch. The absence of simultaneous monitoring of tactile pressure and temperature change is the main obstacle, according to Kuniharu Takei, a professor in OPU’s Department of Physics and Electronics and the head of the research group. Creating elastic, flexible soft robotic hands was the barrier for the integration of multiple sensors. OPU researchers have for the first time successfully integrated multiple nanotube-based tactile and temperature sensors into a pneumatic balloon-based soft robotic hand without sensitivity to bending of the structure of the hand.
An array of four tactile sensors and one temperature sensor based on highly conductive single wall carbon nanotubes can monitor sliding or slipping movements of an object from a robotic hand by detecting the time delay of the tactile force. This provides real-time feedback so that the robotic hand can adjust the actuation force to prevent dropping the object.
Furthermore, a robotic hand with nanotube-based sensors can detect the tactile force and temperature generated by a human hand, while each sensor measures the tactile force generated by a human finger independently. These functionalities give the soft robotic hand the capability to imitate human fingers and shake hands with a human.
The sensing mechanism for tactile sensors utilizes the contact resistance change between silver thread and paper with a flexible, conductive single wall carbon nanotube layer. For temperature sensing, a mixture of single wall carbon nanotubes and tin (IV) oxide (SnO2) enhances the temperature sensitivity and also enhances the stability of long-time sensing. For both devices, TUBALL TM single wall carbon nanotubes, produced by OCSiAl, were used.
"Based on my experience, it is hard to find electrically stable carbon nanotube network film deposited from solution. TUBALL TM nanotubes are very stable, so that we were able to develop long-time stable temperature sensors and tactile pressure sensors,” says Prof. Takei.
The next challenge scientists face to bring truly human-like robots to life is expanding the quantity of sensors in e-skin, as well as further developing signal-processing and signal-feedback systems.
More informantion: Human-Like Electronic Skin-Integrated Soft Robotic Hand, Advanced Intelligent Systems https://doi.org/10.1002/aisy.201900018